Naoll-E
At your service !
Naoll-E is a project created on a whim: I am studying robotic, love that and I wanted to make my owm robot. As I was on vacation, I decided to create one. After two weeks of studying, measuring, 3D modelling, printing, soldering (with burn sometimes), coding, testing, 24 coffee and two or three sleepless nights, Naoll-e was born! But here we have one specific tab for it, so let’s dive deeper!
Here is a content so you can navigate easily in the text. It also allows you to have a break, a coffee or anything you want and start reading again where you’ve stopped.
Make a robot? Ok! But what will it have to do? Well… As much as it can! This project’s idea is to work on all the skills acquired all along my personal, school and professional life but also to develop t new ones. Naoll-E is not only a robot, it is more a multidisciplinary project in keeping with my experience. That is why, I chose to make an interplay robot, offering numerous possibilities. As I worked with Pepper robot, I kind of wanted to have mine at home.
At first, I was wondering what I wanted to do with Naoll-E and I finally decided to create two cases:
In the autonomous mode, Naoll-E can evolve alone its environment. I wanted it to do an embedded software programming type: Naoll-E is listening to all its sensors and reacts instantly. At first, the goal was to make Naoll-E move in an unknown environment without collision, when detecting something making a “smart” decision for the next direction. As EVERYBODY is asking me for a vacuum cleaner robot… let’s say that it is a good training!
The Manual mode is more for interaction. Staring at a robot moving around is fun but only for a short time (the vacuum cleaner again). With this mode, I wanted to review my studies in cognitive sciences and human-robot relationship: which communication channel will Naoll-E use to send a message or an emotion.
All the objectives being clarified, I could start thinking about the sensor and the actuator the robot should integrate. And that makes the bridge to the next topic: electronic!
Currently, Naoll-E integrate:
Naoll-E’s “brain” controlling the entire robot is an Arduino MEGA (board including a 5V micro controller ATmega2560 8bit). I chose this one because it has a lot of input/output and serial ports so that Naoll-E can be easily upgraded. One of the MEGA serial port is linked to an HC-06 module allowing s Naoll-E to have Bluetooth communications.
For the motors, I used a double H-bridge circuit so I can change the speed with a PWM signal and also change the direction. Each H-bridge controls a caterpillar track.
The power supply of the robot is a 7.2V (2 cells) 1300mAh Li-Po battery. It directly powers the motor and the Arduino board which has an embedded regulator. For the 5V devices (servomotor, HC-06, rangefinder…) I added a 7805 linear regulator. This is why I added a fan to cool down all of the robot electronics. A good upgrade would be to change the 7805 into a buck converter to avoid the loss of energy and have more available current. But trust me, I’m working on it!
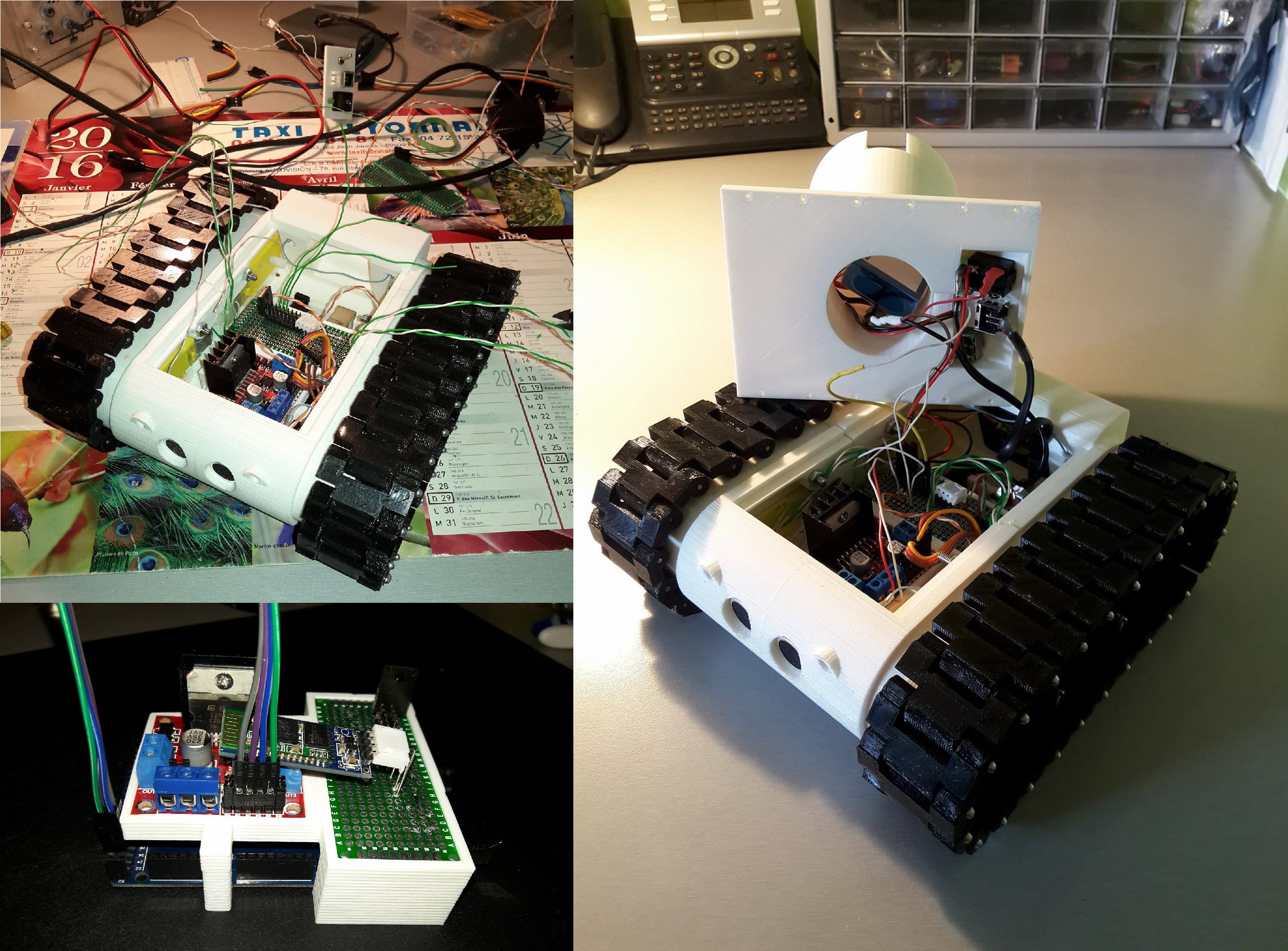
While I was testing the electronic, I also started the 3D modelling and printing to see if they could match and work together.
At first, sketching! I often start by making small drawings on a piece of paper to test several combinations of ideas, shapes… As I love Disney and Pixar, I took from Wall-E the idea of the caterpillar tracks. This system has a lot of benefits: it is more beautiful than wheels and is efficient on various surfaces and with a good speed. For the body, I did not want it to be too square, more like Eve (to stay on Wall-E movie).
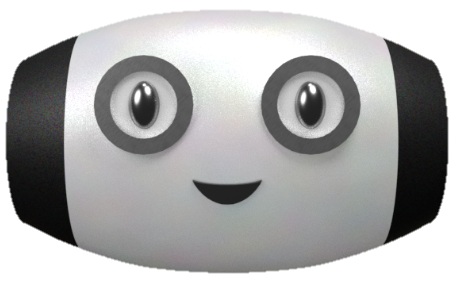
I started by modelling the head, because it gives life to the project and that’s motivating, but also because it integrates the sound and the rangefinder. Those two things are really important for the interaction, especially the sound which is the main communication channel of Naoll-E. BONUS: hearing is the only sense we cannot voluntary stop. We can close our eyes or watch in another direction, stop tasting, stop smelling, stop touching, but never stop hearing. Hearing is always ON and at 360° => powerful communication channel. This was the bonus information!
Anyway… At the beginning, that was Naoll-E:

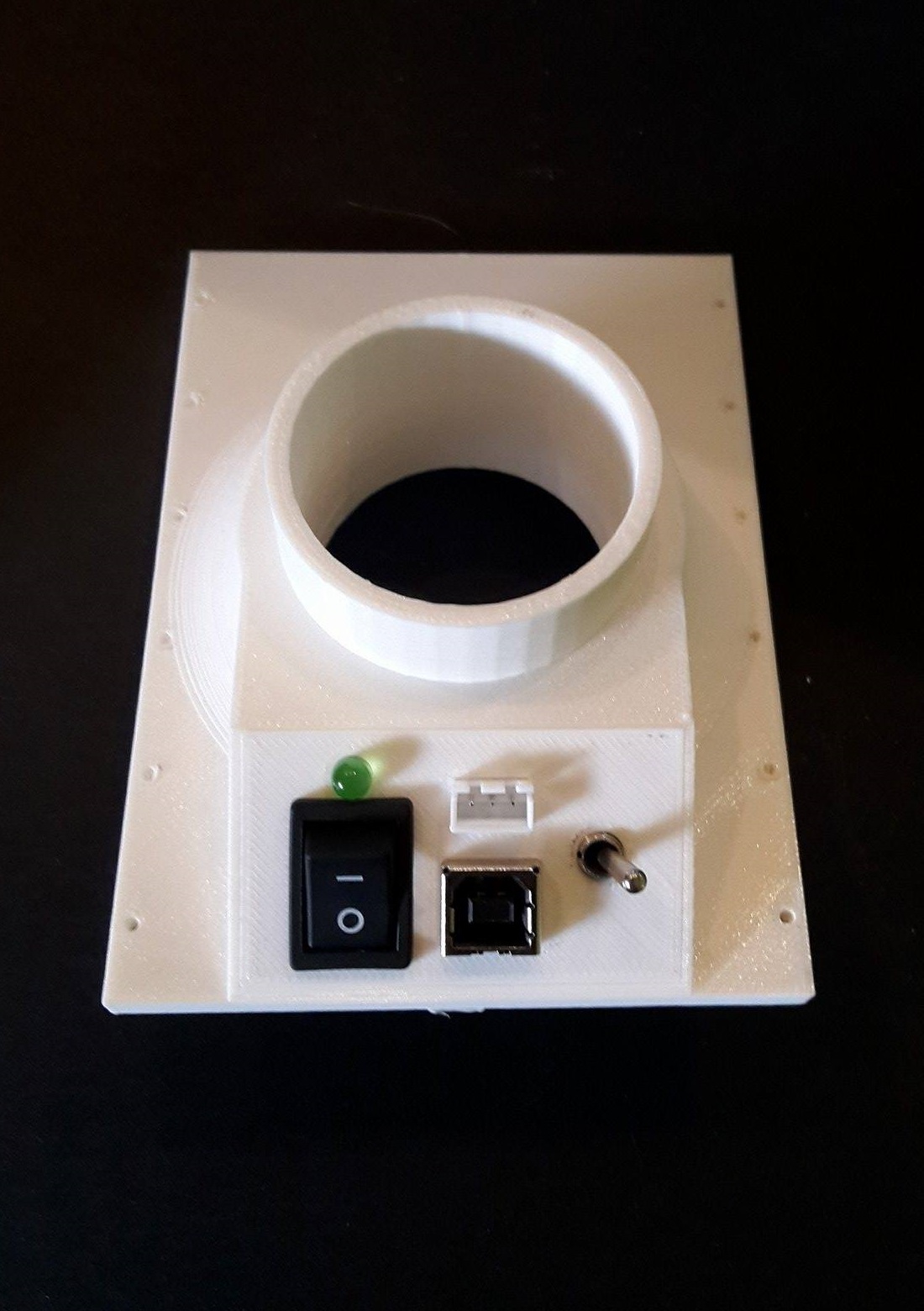
Then follow the shoulders, the chest and then the waist : the panel control of Naoll-E! Ok, only 3 buttons… but there are really necessary. From this panel control you can turn Naoll-E on/off, change the mode, charge her and flash a new program. I told you, a real panel control!
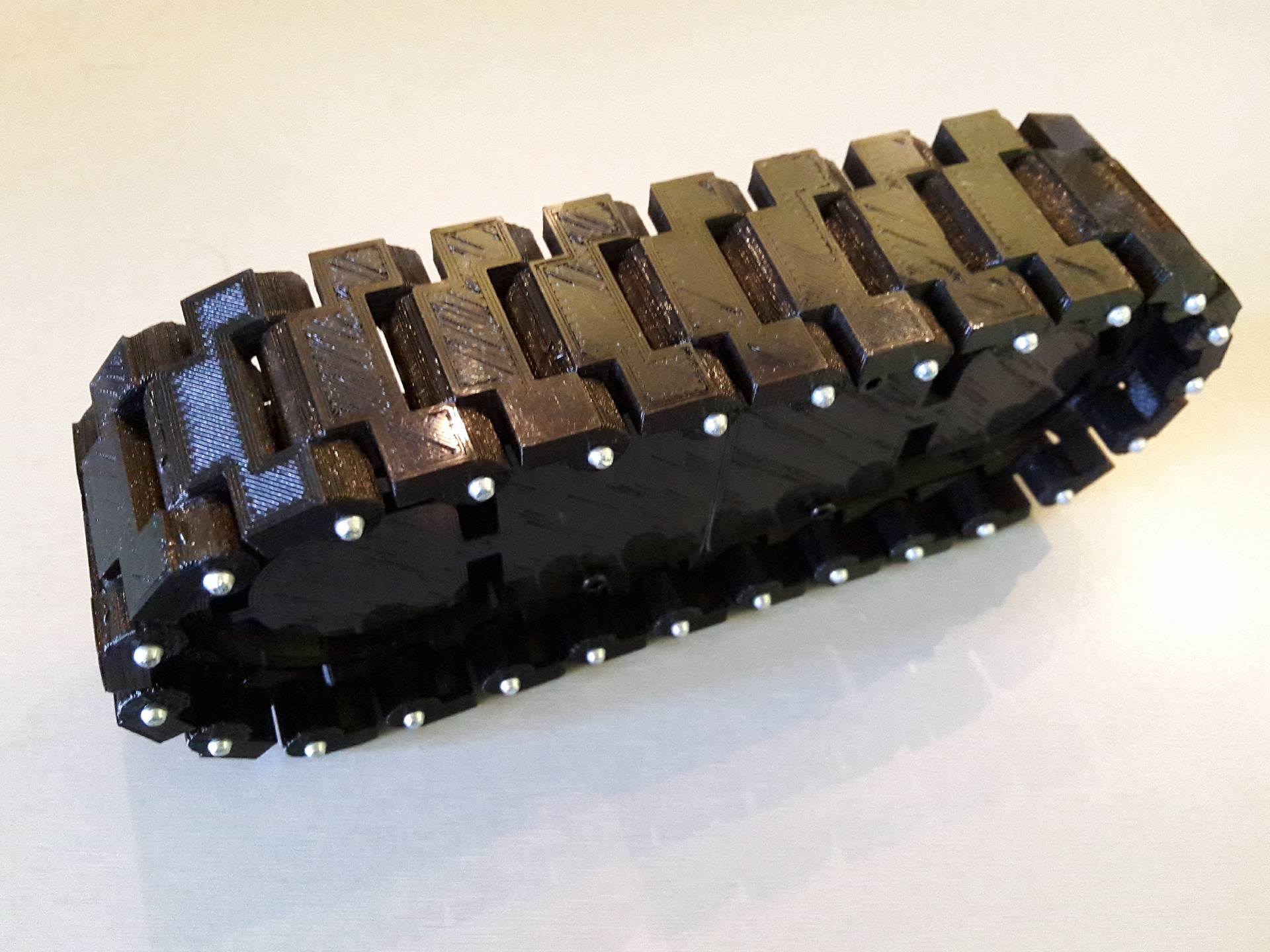
Then comes the… feet?! Ok let’s say the basis (is there podophobe here?). As I told you, I wanted to have caterpillar tracks. I did not want to buy a premade base because I wanted to insert the electronics in it and I did not want to have disparities between the body and the basis. (and $_$). I found a pattern to print in Thingiverse: here is the link. I only took from it the caterpillar system but I have fully modeled the basis in order to add functionality (fan, electronics supports…). I replaced the PLA filament rivet by metallic one because it makes it nicer. Nicer but harder according to the system dynamic. But finally after reworking it, everything works well and looks like that:
Finally, I modeled and printed the basis. I wanted to have something compact but also practical! One of the most important thing I learned is: when you create something, consider how to take it apart easily. As I knew that the electronics would be sooner or later upgraded, I paid a lot of attention to that. For example, there is no need to cut of all the wires to take the body apart of the basis! After two full 12 hours of printing controlled every 2 hours day and night (when loving it , nothing else matter, does it?), here is how the assembly looks like:
Let’s build everything up and here we are! You have a beautiful robot who… looks at you tirelessly without moving an inch… Let’s start coding to give this robot a little bit of life!
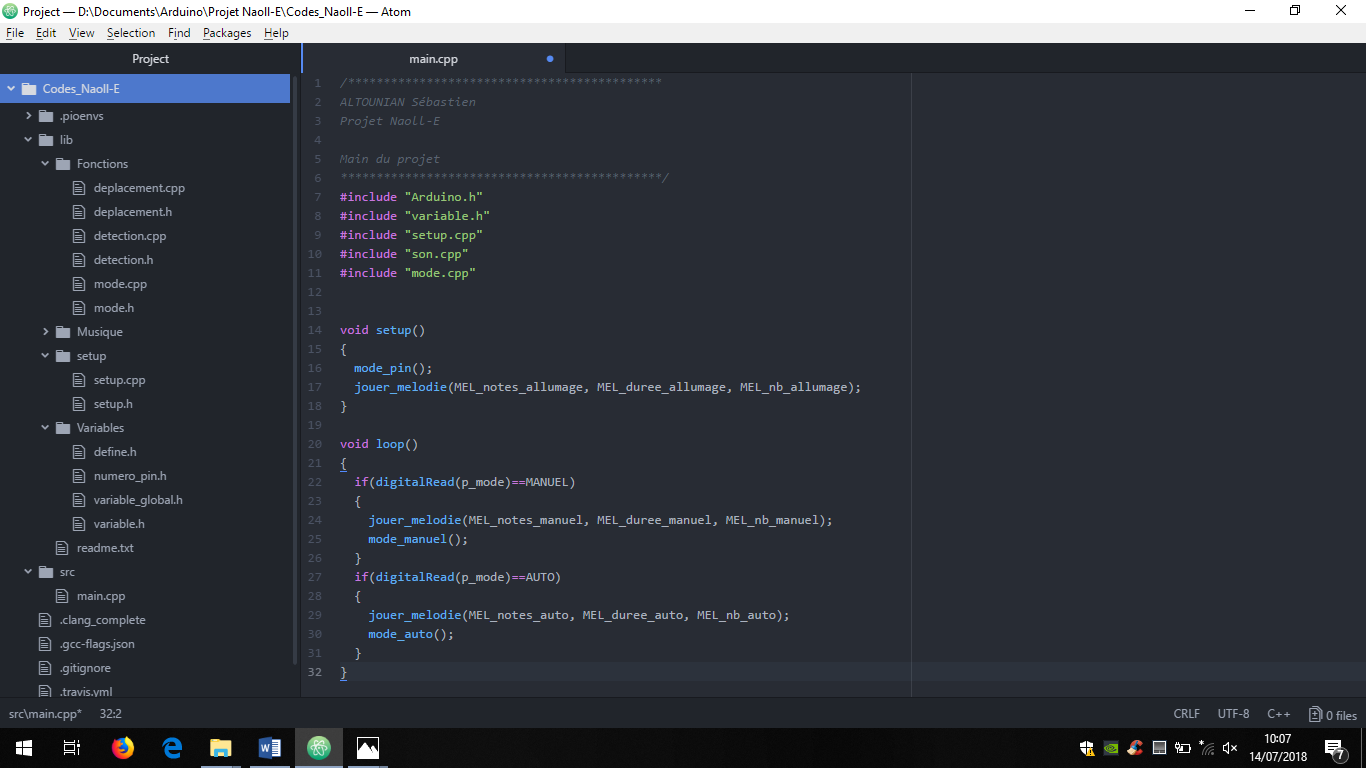
Here also: preparation, thinking, snacking… Platon said that we cannot philosophize being hungry. I wanted to make a clean work, that’s why I took precautions. Before coding, I prepared all the code structure, the variables names, the functions… And that was the result:
Autonomous mode:
Currently, Naoll-E can move in a room and when it sees an obstacle, it looks around and chooses the clearest way to go. But for the moment, avoid stairs …
Manual mode:
For this mode, you need a smartphone with Bluetooth connection to control Naoll-E. You can use two applications: “Bluetooth RC Controller”, available in Playstore, which allows you to control Naoll-E remotely, and the “Hi Naoll-E” available on download tab.
For the moment, I developed the prototype with a tool named “MIT App Inventor 2”. It is a powerful and simple tool to create mobile application fast. When it will be clear what the application should do, I will recode it from scratch in JAVA to improve my skills in mobile programming. For the moment, here is a screenshot showing you what it looks like:
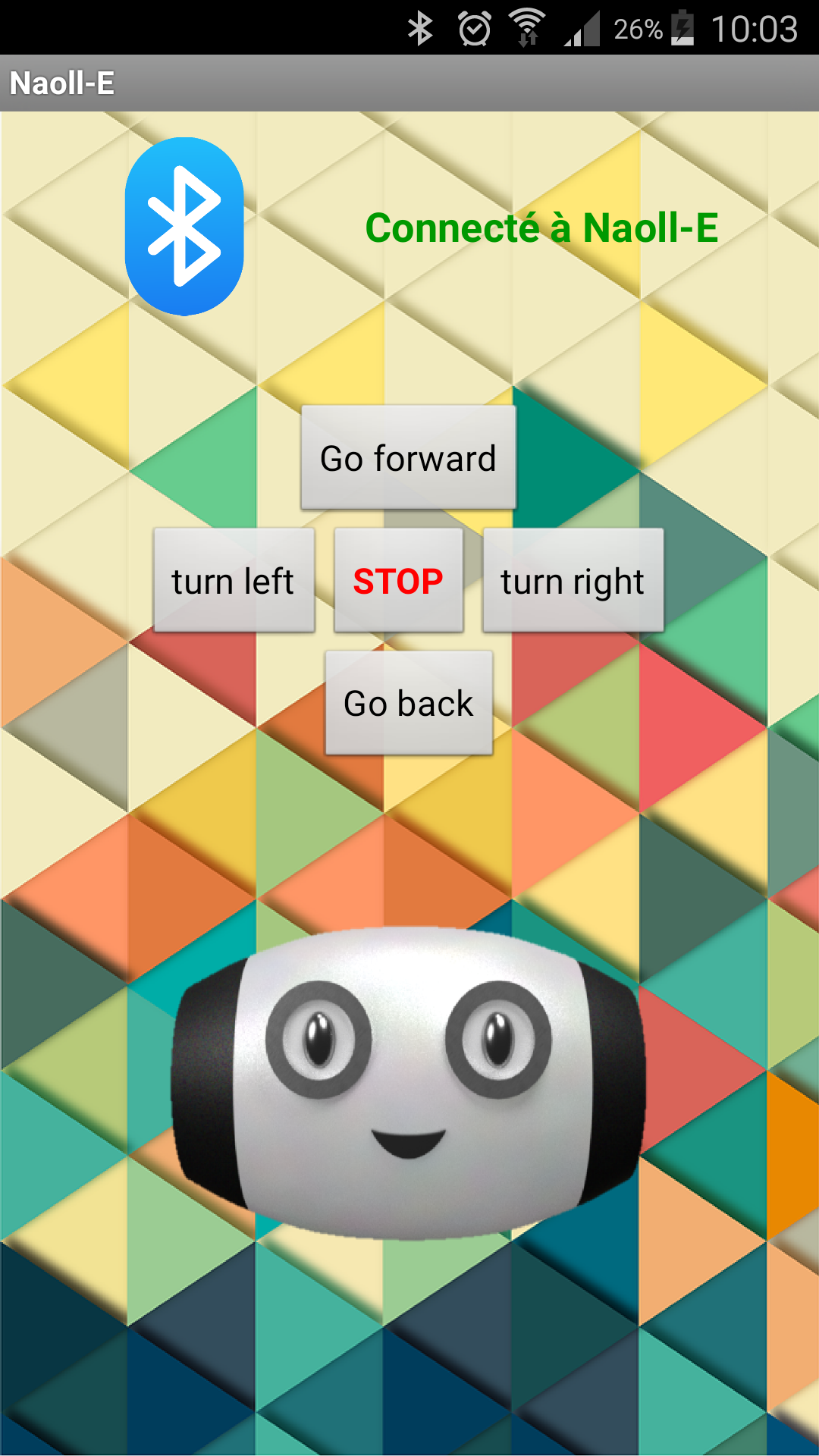
The application is using the Google voice recognition to transform what you said into a text understandable for Naoll-E (do not worry, microphone is ON only when you press the button). Then, it sends to Naoll-E a Bluetooth command so that it can answer. I recorded several options to add flexibility to the dialog (e.g. bonjour = salut = coucou).
The final goal is to integrate a voice recognition in Naoll-E so that you do not need a phone. But that will be for Naoll-E version 2.0! I am working on it so don’t forget to check the website! Speaking about website…
I have been wanting to create my own website for quite a long time: websites are one of the most important communication channel of the 21st century. Moreover, since I am working in digital and new technologies sectors, I need to have one. Naoll-e was a good reason to create my own. It allow me to present myself, my projects and also have a download platform for the application.
Currently, the website uses HTML, CSS and JavaScript. I’m trying to make it responsive (adapted to the screen type: computer, phone…) so if you see something strange on your screen, please send me an e-mail using the contact tab. I’m working on the website during my free time: this explains why there is a lot of “work in progress” all over the website.
The next step for the website is to add PHP to make it easily maintainable and add some tools like WordPress which allowing me to write articles describing my other projects (arcade, RC plane, wood-work…).
I would like to thank Floriane Lagarrigue who helps me for the translation : she spared you some unsightly faults ! So thanks Floriane !
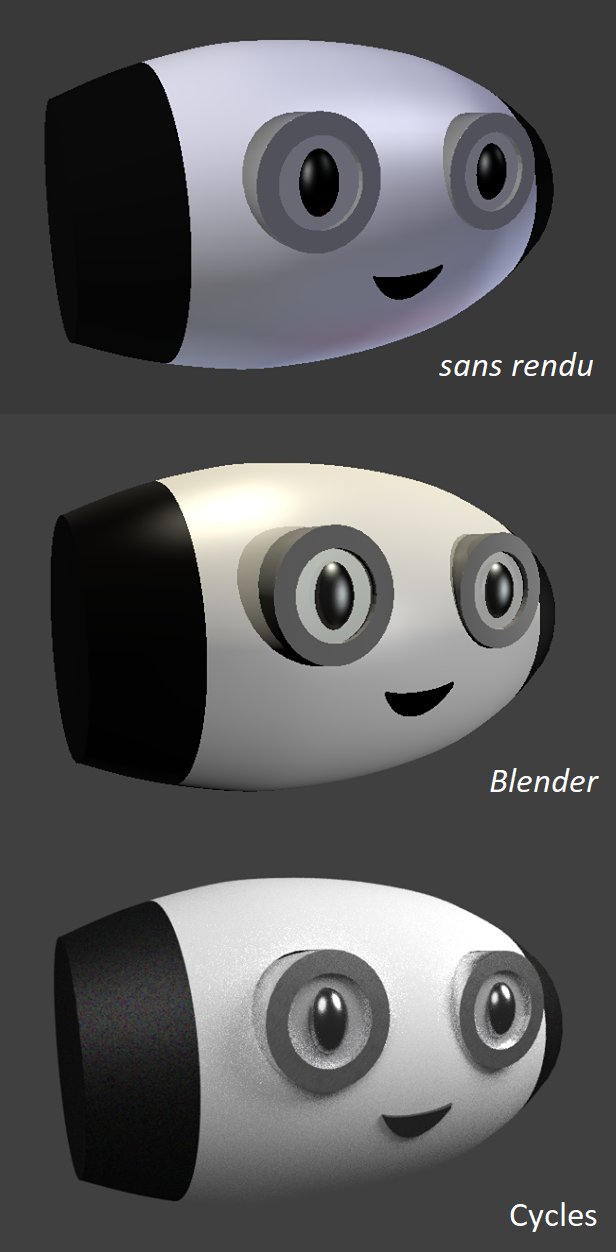
I wanted the website to be welcoming and to give a good image of Naoll-E. That is why I started to model Naoll-E’s head before creating the website. My first thought was to play an animation by opening the home page but it is also a “work in progress”. I currently use the first frame of the animation as a logo for the entire project: by creating it, I was looking for a design I liked and that I could use for every media (application, website…). It gives a good artistic cohesion to the entire project. Even my résumé uses the website colors !
I found the copyright free background image on the Internet but I cannot find the link anymore: I still want to thank this person who shares her work on the web.
To be more technical, I used the software named blender to create the animation. It is a professional, free and open-source 3D computer graphics software toolset that I discovered at school I tried a lot of different parameters to select my design . Finally, I am quite happy with the result. What do you think?
Here is a little video to see Naoll-E working!
As you can see, Naoll-E project is full of options! I have a lot of idea but not enough time! The next big step is to add a microcomputer (raspberry pi zero W) to increase Naoll-E’s utilities. Do not t forget to check the website from time to time to see the project grow up!
If you have Ideas, questions or if you just want to speak about the project, send me an e-mail to contact@naoll-e.fr
You can also visit the rest of the website to get to know me.
Hope that you enjoyed reading!